2025 FRC SEASON. THE MOMENT WE WAITED FOR. IS HERE. I can’t say this moment snuck up on us, as most of us had a countdown running.
Saturday
Before the game was officially released, we introduced our Kickoff process, explaining how we will start the build season. On the day of kickoff, we focus on talking about what we want our robot to do and not how. Then prototyping will begin, focusing on exploring options that match our goals. Then we defined how iterations would occur, instead of looking for a set final design, we must build up on designs and constantly improve. The plan is to create an Alphabot, which is a hybrid of all the prototypes to create a robot that performs the target actions. The Alphabot is not made to be competition ready but to be made to build off and learn from. This helps the team get drive practice, test code, and identify any challenges that occur while playing the game.
Without knowing any details about the game, we made a list of SMART (specific, measurable, achievable, relevant, time bound) goals for the team. These goals range from specifics about what we want the robot to accomplish to ensuring healthy habits. We use build season and competition weeks to measure ourselves as a team when we want each goal accomplished by. These weeks help us time and prioritize different goals while preparing for each competition.
Game Reveal
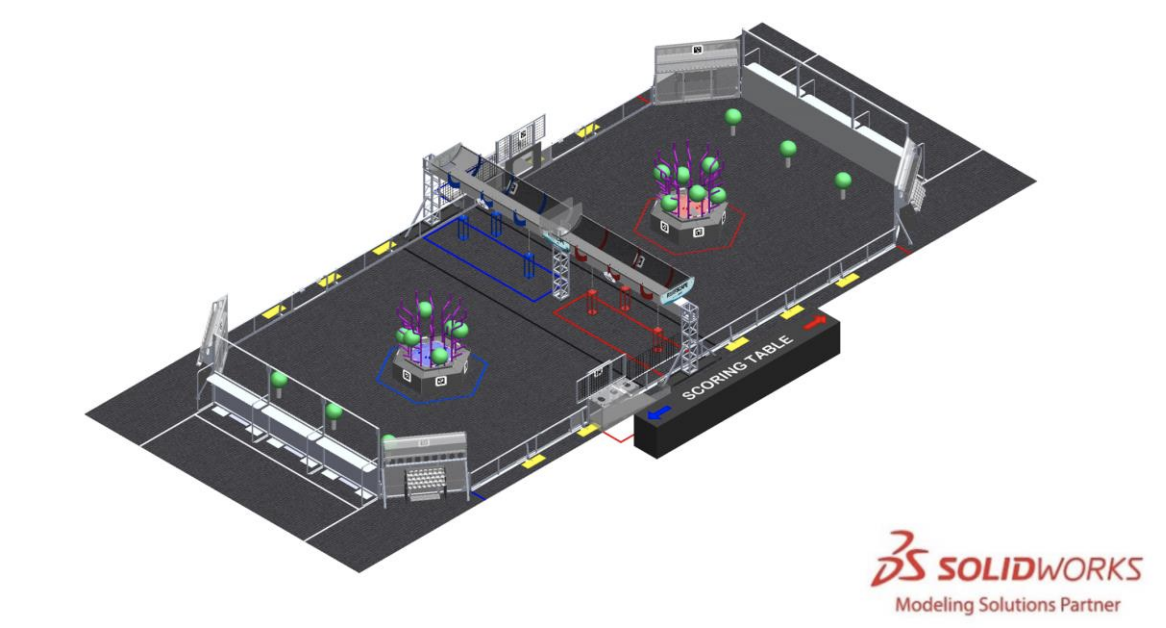
Dean Kamen (while being an icon) helped reveal the 2025 FRC game, Reefscape, which was hinted to be water themed. On each side of the field each alliance has their own Reef full of Algae, a large teal balls that robots can grab and shoot into a net on the barge, set in the middle of the field, or score it into their processor for human players to throw into the net. Coral, a large PVC pipes, can be scored on four different levels of the reef for more or less points. During the end of the match, robots can grab onto hanging cages shallow or deep cages to complete a climb.
Rule Reading
After the game reveal, the team separated into groups to go over and read the rulebook, everyone taking turns reading the paragraphs. In our groups we listed changes from last year and other things we think would be important to remember. Listing different constraints on the robot like weight, extension limits, and rules for handling elements. One part of the rule book stumped absolutely everyone. Nobody could find a vertical extension limit, the team started to think about just how far do we want to vertically extend the robot (10ft anyone?).

When we regrouped, a student representative for each group was chosen to present their findings. To make the day a bit more exciting, we challenged students to present round robin style. Each representative would take turns sharing a different finding until they ran out, the last one standing won candy for their whole group. Jay and Ainesh were the last two standing, going one on one against each other to name as many rules as they can with Ainesh coming out on top.

Human Bot Edition
To continue the fun, we went outside and played a Reefscape “match”, replacing robots with students also known as Humanbots. We drew up a field using chalk and utilized colored cones for Algae and Coral and students for the Reef and Barge. Students were separated into their groups as their own team making up a robot, driver, and game elements. This was a fun way to see how a real match might occur, but mostly it was an exciting team building activity. Humanbots rushed around in confusion trying to navigate through the field while game pieces started running out then they rushed to the cages. Each match ended in bursts of laughter as many students were having fun going around and trying to collect points in this chaotic game.
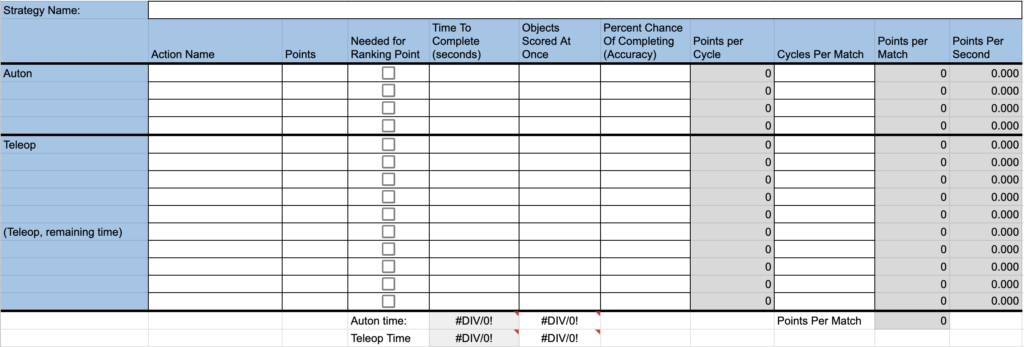
Strategy Analysis
After getting an idea of how to score points during a match, we separated and collaborated on strategies to score the most points. Going by action by action, groups estimated the time it would take to score in different places along with a percentage of how often we could successfully score. Each group came up with different strategies based on what scores they think are the best to present to the rest of the team later on. Some strategies leaned more on the silly side as one group found that you could buddy climb on a deep cage with one robot on the deep cage, two robots attached to that robot while also holding the other shallow cages for more points, which is insane.
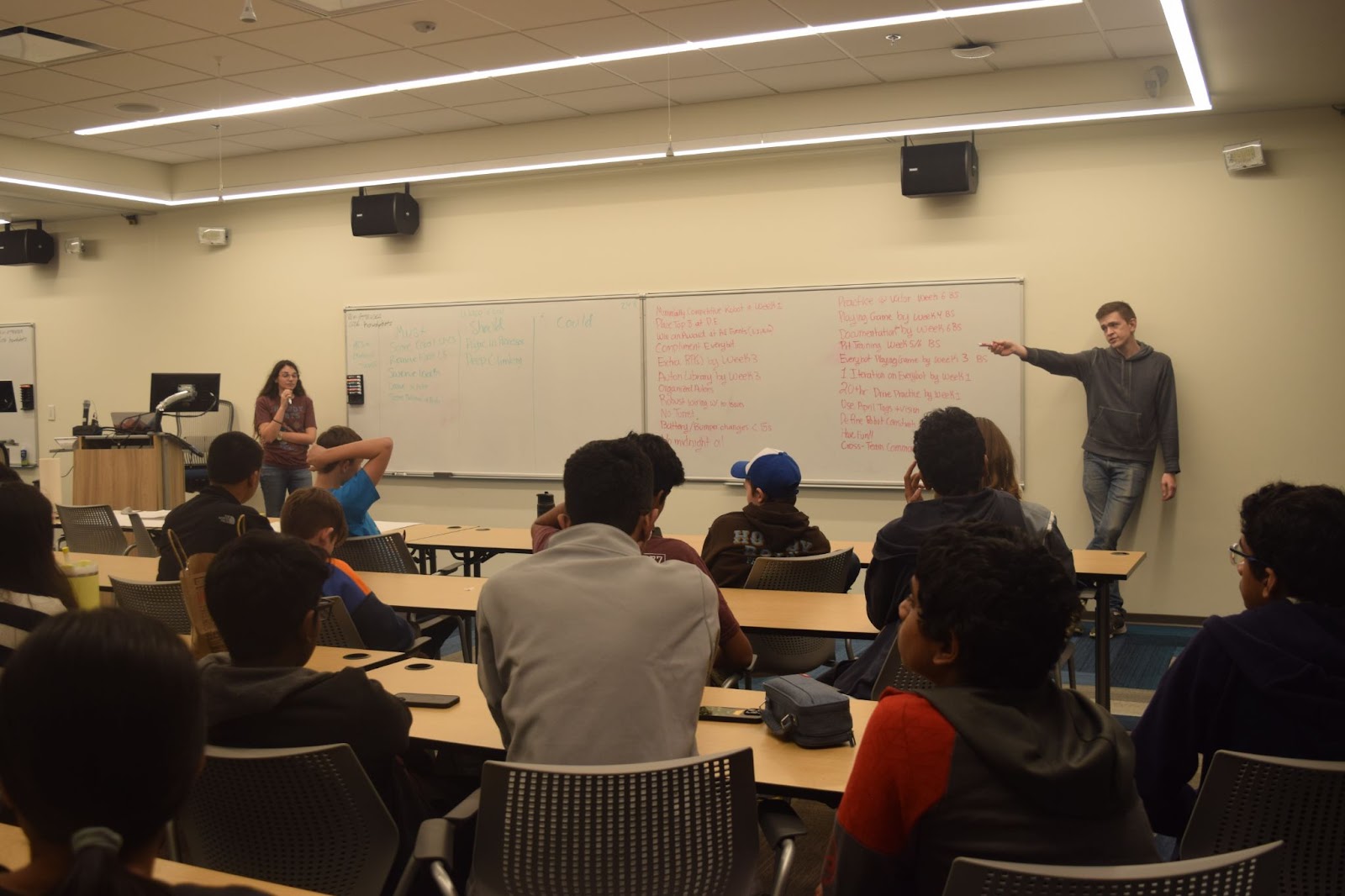
Once we found out actions to score the most points, we made a must, should, and could list for how we want the robot to perform. We suggested actions ideal for a match and everyone agreed on whether the robot must, should, or could complete the action. While some votes were pretty unanimous other voters were able to argue for their vote which lead to some interesting conversations. We kept in mind what we could realistically get done for our first competition, then added to what we believe we can complete by our second competition. This list is to help us visualize what our goals are when designing mechanisms for the robot.

After a very long Kickoff day, we continued to have an extremely productive weekend. Before, we had to avoid any talk of mechanism designs, but now we were finally given the opportunity to share, collaborate, and brainstorm any ideas made during the last 24 hours. Now, we were able to dig deeper into mechanism designs and how exactly we want our robot to perform at competition.
Sunday
As a quick morning refresher, we rewatched the game videos, focusing on how to manipulate game pieces and deal with field elements.
Decision Matrix

Next, we divided into mechanism groups and brainstormed designs while breaking down how well they would perform, including points like weight, difficulty, use, and many others. Each category was given points 1 through 10, 10 being the strongest and 1 being the weakest. We entered all the rankings into a google sheet that would calculate which design has (theoretically) the best performance. The team grouped all up again and each group presented their ideas, sharing their thought process and helping others visualize their design. Halfway through presentations, all our power went out! However, that didn’t stop us from continuing our day’s plan, we went to an early lunch (which sadly some could not have without a microwave) and got a bit of work done without power or wifi.

Leadership Meeting
While the team was on a lunch break, student leaders and a few mentors collaborated on what our goals would be while prototyping and building the Alphabot. We decided that the Alphabot must be able to score L2 and L3 on the Reef with an elevator, intake from the ground, remove Algae from Reef, robot vision, and bumpers. A group of students even began to fix up our field to prepare for building new field elements, giving us a fresh start for the new season. Once the power came back on, we were finally able to finish deciding which mechanism designs to pursue. We agreed on a horizontal intake to pick up Coral and an elevator system to score.
Back to Work
From there, students broke off once again into mechanism groups to start prototyping and building the Alphabot, focusing on how we expect the robot to perform. However, our new members started assembling a Kitbot, this gives students more hands-on experience and an opportunity to include creative ideas to improve the Kitbot. For the remainder of the day, students continued to work on their prototypes, experimenting with the game pieces, and preparing work within their guilds. Though lots of students were a bit exhausted from the back to back days, we didn’t waste any time and we were pretty productive all weekend.

Leave a Reply
You must be logged in to post a comment.