With heaters set up all around the shop, students worked on the competition robot building parts based on the prototypes they have used on the alphabot. In the 30 degree weather on Tuesday our usual meeting was canceled because of the weather. In Austin Texas we actually had a SNOW DAY! Everyone spent the day at home warming up or playing in the snow. Since the snow only lasted for one day we held a make up meeting on Wednesday for anyone that wanted to make up other meetings that they missed.
Drive Base & Climber
The drive base team started with adding all of the electronics to the belly pan in CAD which helps organize for when adding them onto the actual competition robot. The Drivebase was then assembled with drive rails and the electronics panel was added. (Starting wiring soon hopefully done today aka Thursday)



Ascender
The new elevator for the competition robot was assembled this week. It is made of 3 foot Carbon Fiber circular tubes, that were given to us by Firefly Aerospace (THANK YOU FIREFLY!), and other 3D printed parts that were made in the shop. This assembly was mostly a proof-of-concept, as we knew the continuous elevator would work from our Alphabot elevator, but we wanted to ensure the circular tubes wouldn’t cause unforeseen problems. The elevator in resting state is 47.75 in tall and 72 in when extended, and that’s without the carriage (6 ft is crazy). It was then attached to the robot only needing to be wired.




Game Piece Manipulator
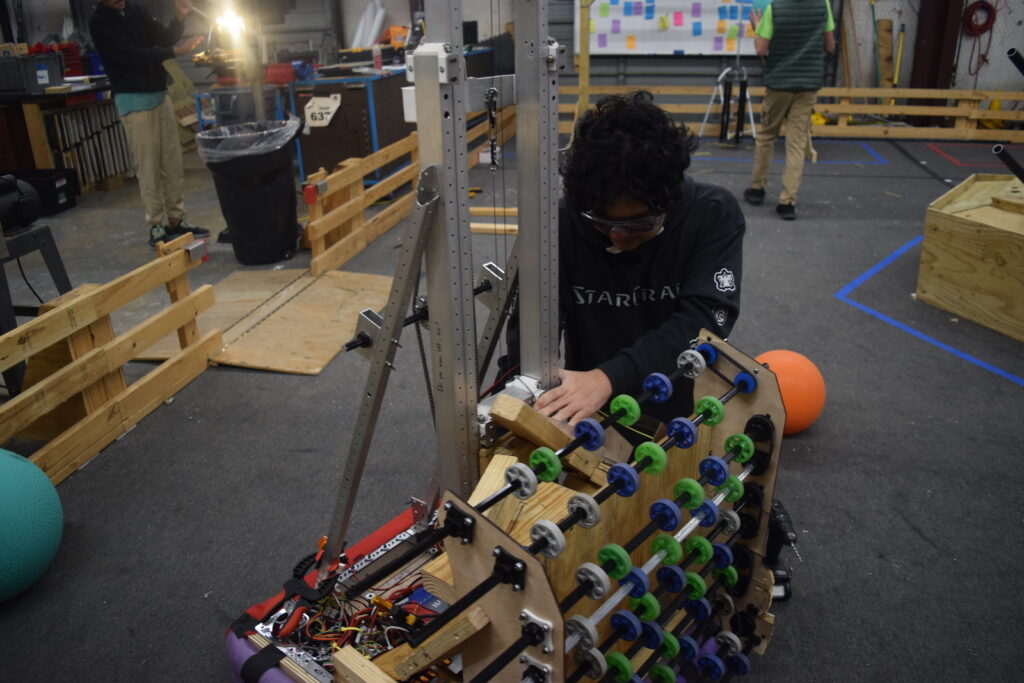
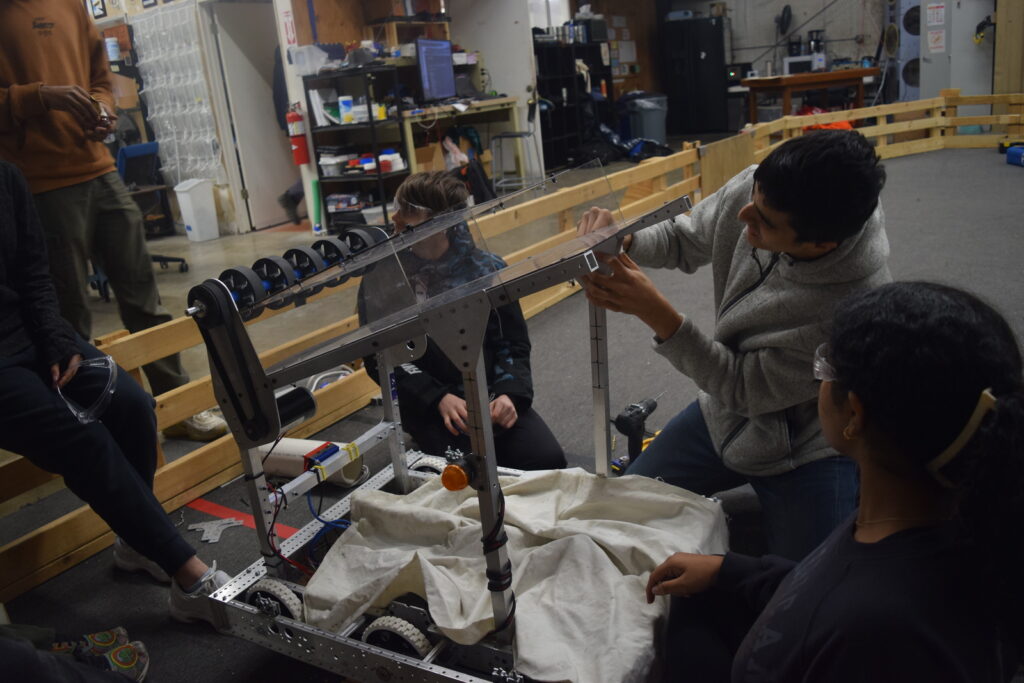
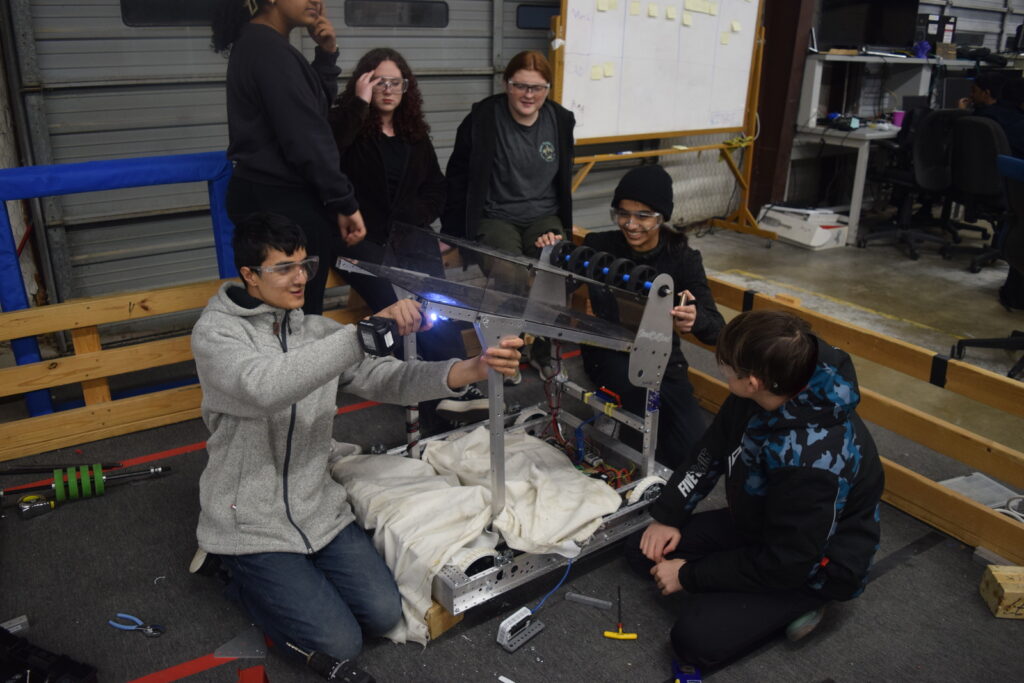
The game piece manipulator team continues to make new prototypes that test how we could intake the game pieces. The most recent prototype an intake using pvc tubes and rollers that moves the Coral left to right. This was done by using a variety of different grippy tapes such as gaffers, insulation, duck tape to move the Coral. Though it showed promise in moving the game piece, it wasn’t as fast as we had hoped. The team decided to go back to the drawing board to come up with a new indexing strategy for the intake. On the Alphabot side of things, the wall of rollers is proving to be very useful for driver practice. It is getting a good beating during practices, needing some extra love on longer meeting days. Though it provides much benefit it is a roller hog! The top 2 axles of wheels needed to get swapped out to use for some newer prototypes. So the “Wall of Rollers” is now “Wall of Slightly Less Rollers”.



Kitbot Team
Our Kitbot team continued on with intake prototyping. Most of what the kitbot team worked on was vision of the robot. First trying to work on Photon Vision they found that id does not support custom models unless you use Orange Pi 5. So after deciding against Photon Vision they used YOLOV5 for object detection making it possible to detect Coral, humans, phones, keyboards, monitors, and more. The team eventually moved onto using YOLOV8 and also attached a Limelight to the kitbot.


SEE YOU NEXT WEEK!
During this chilly week progress has been made on the competition robot with new intake prototypes, the elevator and electronics being attached, and wiring. The competition robot is on its way for testing and practicing on the field.




Leave a Reply
You must be logged in to post a comment.