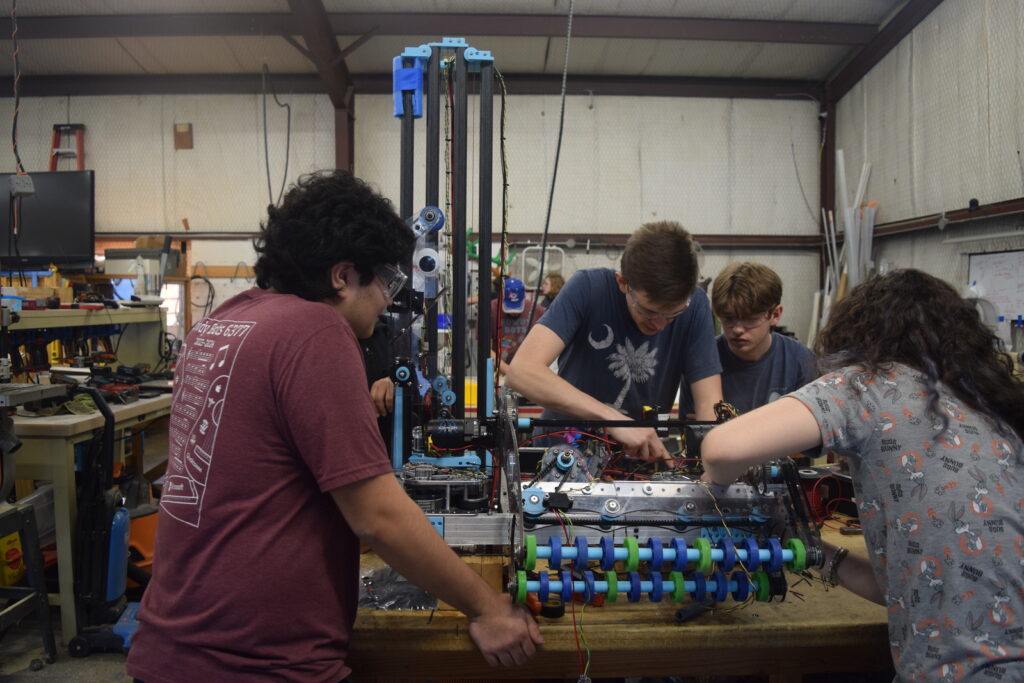
As time goes on our robot is getting closer and closer to being ready for competition with programming testing out code on the field and small iterations are made here and there. With our intake fully assembled and mounted on the robot we cannot wait to see how it works out! With the robot finally being completed some visual elements have also started being added, the first being GOOGLY EYES, and hopefully some more soon. We have also announced our Deans Lists and Woodie Flowers nominees, so with that said a big congratulations to the students Jay Kinvig & Rhys Buckland, and our mentor Jay McNelly for all of their hard work and contribution to the team!
Drive Base & Climber
After some iterations were made on the elevator and the intake was fully assembled, the drivebase team began attaching these mechanisms to the competition robot for field testing. With attention to alignment mounting and wiring both mechanisms completely, then the sensors were added to the robot. During this time, the team noted an issue with the encoder’s power. Luckily, this was an easy fix for the team and was done in no time. Outside of the drive base itself the team has started working on a prototype for a deep cage climber that will be placed in the middle of the robot to reduce any swinging during climb.


Ascender
With the elevator basically finished there have been many iterations throughout the week. The rollers shape has been changed in order to capture more of the rollers and make the elevator wobble less. The carriage was also changed to allow wires to pass through it without the team having to disassemble other parts of the elevator, because ain’t nobody want to do that over and over. The gearbox was changed only slightly by spacing out the gears farther for when the capstan is wired and then they pull towards each other then it was re-greased to create less friction and help the elevator run smoother because it had trouble with constant brown-outs when trying to move, though the gear ratios stayed the same. Along with that the motors were switched from Falcons to Krakens to reach the full power that was calculated. The extension for the scoring mechanism that was added last week was switched out with one flush piece on each side along with a tab near the top to help guide the game piece while scoring. The sensors were also changed from a time of flight sensor to a LaserCAN sensor. While the main design for the elevator hasn’t changed many iterations have been happening to improve performance on the field.
Before
Now
Coral Score in L2
Coral Score in L4

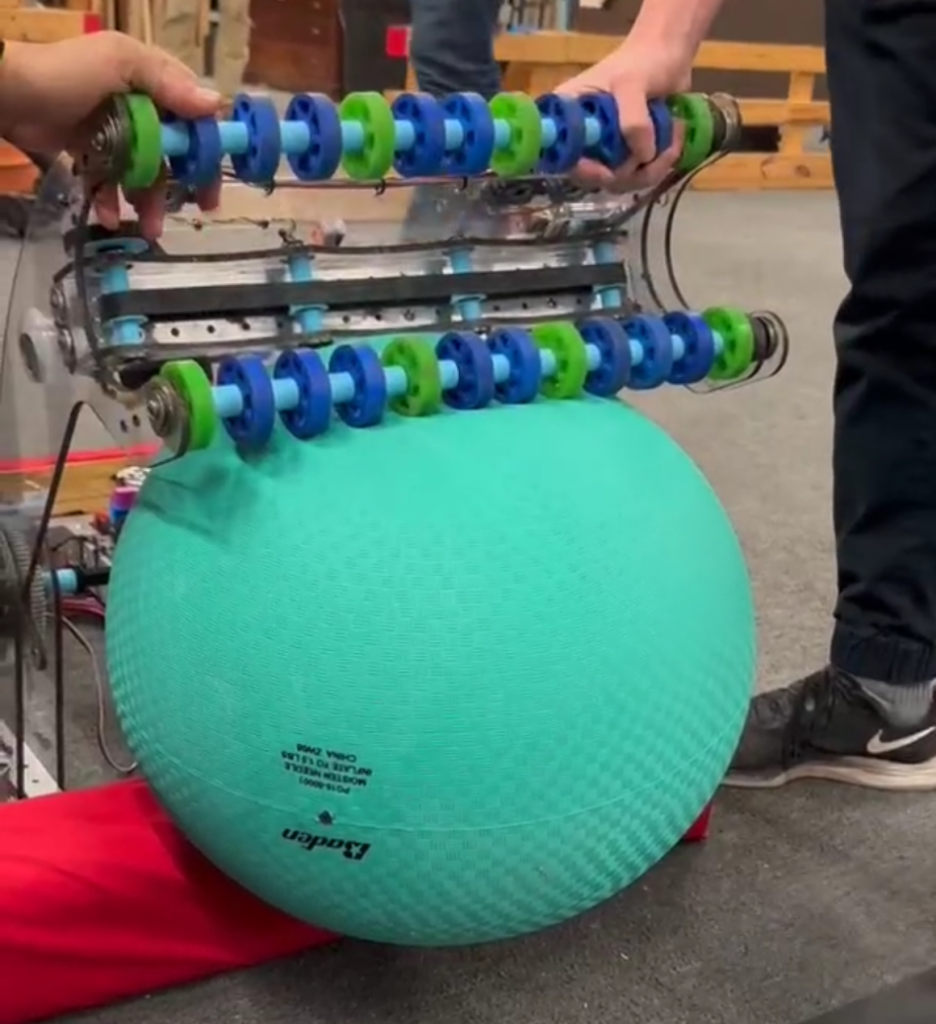
Game Piece Manipulator
After all the CAD for the intake was completely finished the Game Piece Manipulator team took the whole weekend to fully cut, assemble, and mount the intake onto the competition robot. In addition to making the entire intake they worked on some wire management with the drivebase team while mounting the intake onto the competition robot. After the intake was mounted onto the robot they found out that it can also pick up algae off of the ground using the bumpers as support, this will make it easier for us to score algae into the processor.

Kitbot Team
While the robot is undergoing testing on the field the kitbot team has been working toward training other team members more about CAD. The team also focused on starting programming for auton. During competition the first 15 seconds of the match is done without a diver or human controlling the robot in any way, this can change the trajectory of who wins a match. Since we are having students work on auton now, hopefully we will have a completed program that is tested and ready for competition.


SEE YOU NEXT WEEK!
After a week of wiring and testing the team continues to use the field and iterate any problems they find on each part of the robot. We cannot wait to see everyone at a competition in Waco that is in the very near future cheering along with the team. With the week at hand we have one last thing to add, to be competition ready we have not only come to finish the robot but we have finally started making BUTTONS!


Leave a Reply
You must be logged in to post a comment.