Our Rodeo will be live on September 21st from 2:00pm to 5:00pm. Tune in to see it live, or check back here for match footage, qualification scores, robot information and the final scores!
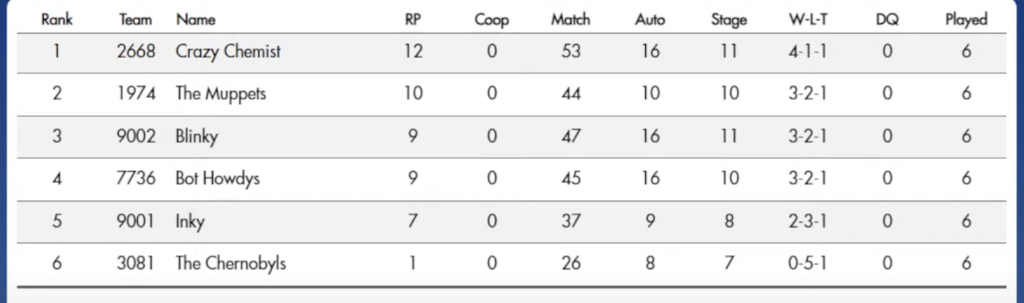
Event Results
Alliances
Team 2668: Crazy Chemist and Team 1974: The Muppets
Team 3081: The Chernobyls and Team 7736: Bot Howdys
Tournament Winners

Tournament Finalist

Tournament Awards
- Quality Award Team 1974: The Muppets
- GP Award Team 7736: Bot Howdys
- Creativity Award Team 3081: The Chernobyls
Meet the Teams

Team 1974: The Muppets
Robot: Beaker
Our robot had a working tank drive, single jointed arm made of polycarbonate, and a functional wheel / roller intake made of polycarbonate and wood. During auto the robot would lower the arm a bit, and move towards the neutralization chamber, setting things up for an easy high score with the pre-loaded beaker once teleop started. During teleop the robot arm could lower and raise to pick up and score both happy and sad beakers (easier happy). Depending on the angle that the robot picked up the beaker, it would set up either a high score or low score.
Team Members:
- Ainesh
- Arjun M.
- Astrid
- Chance
- Hitu
- Jameson
- Lina
- Snehansh
- Tanish

Team 2668: Crazy Chemist
Robot: FeCO
Our robot had a fully functional tank drive.
It has a single jointed arm with a gear ratio to allow the single cim motor to be able to rotate our entire arm and have enough tension to allow the arm to stay up with little to none support from our motor. The arm allowed the robot to successfully pick up breakers and score low goals only. The claw mechanism was using 2 4” wheels which had VHB and gaff tape to increase the radius of the wheels so we can get better grip on the beakers.
Team Members:
- Arhaan
- Avery
- Josh
- Michael
- Myron
- Rhys
- Ria
- Vaed
- Victoria
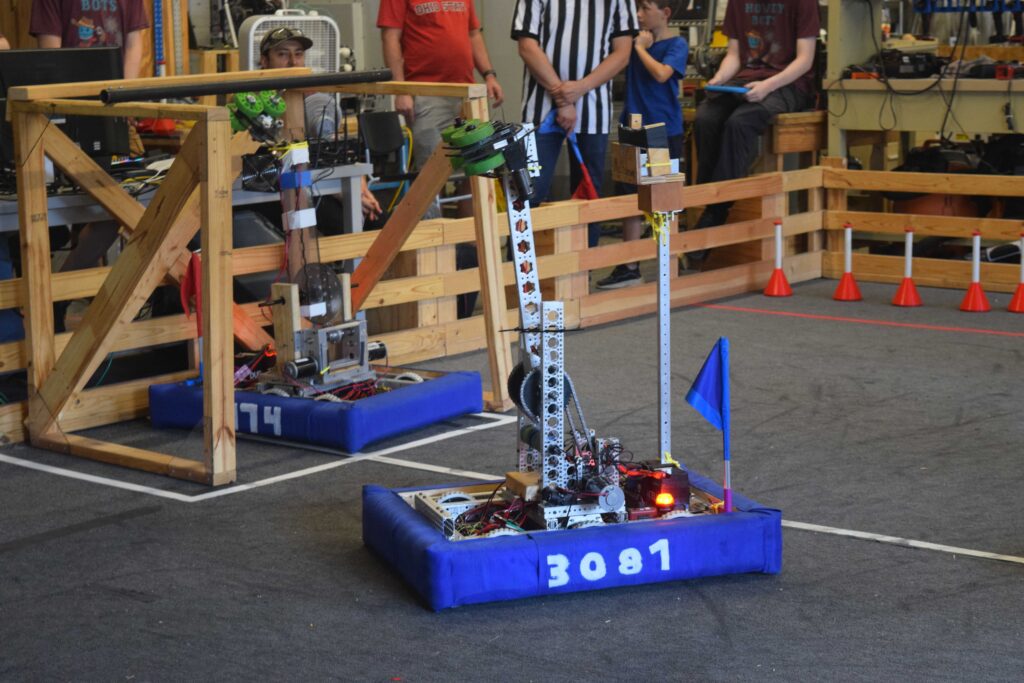
Team 3081: The Chernobyls
Robot: Meltdown
Our tank drive robot was manufactured to be able to score in both the containment (low) and neutralization (high) zone. Our arm was made from aluminum tubing and moved via chains to two CIM motors connected to our drive base. Our intake used two 775 motor-powered to rotate hex shafts with two compression wheels each. Our intake was fixed at a perpendicular angle to the arm to keep it at the ideal position for hovering over and picking up beakers. The robot would score my having the arm stick straight up and having our power intake shoot the beaker into the neutralization zone.
Team Members:
- Arjun S.
- Armaan
- Benjamin
- Carter
- Jared
- Jay
- Milena
- Pranav
- Samyak
- Vomkar

Team 7736: Bot Howdys
Robot: Clyde
Our robot had a fully functional drive base with a gyro. It had a metal pole attached to it to score a beaker in auto, and a floor intake attached to an arm. The arm was powered by to Cim motors with chain, and was made from lazar cut polycarbonate. The arm had the rotational range to score in the lower or upper goals. The intake had 1 small motor that spun 4 compliment wheels connected with belts, and was made form lazar cut plywood, and could pick up beakers from the ground.
Team Members:
- Branden
- Clyde
- Jackson
- Lexi
- Luke
- Prateek
- Shay
- Shelby
- Srinand
- Vishnu